Recent News
Check out our 'build' page
Complete build process
It is awesome!
Our Facebook page!
Lots of updates and things to comment on!
Updated 9/18 with all kinds of new FAQs!
NEW FAQs for 2017:
Why are you doing this again?
What's different this time?
Will it send back pictures?
Who is funding this?
Other FAQ Questions:
Why the different colored dots on the tracking page?
Why does the tracking page have a varying number of dots on it?
Are you going to fly over to get Scout?
What are some of the features of the Scout tracker?
Why does the tracker sometimes miss a dot?
Why did you guys send it directly to Spain? You should have put more waypoints in the ocean!
What are the red and gray lines?
Will Scout crash into Portugal?
What about mobile devices?
Where's it going?
What happens when it flips over?
Some Statistics
Is this project affiliated with a company or university?
Is this the first time this has been done?
Will it be a world record?
How will it be constructed?
What about avoiding collisions with other boats?
Why this project?
How much will the project cost?
What part of this project worries you the most?
How many launches did it take to get her out there?
How long will the batteries last?
Why across the ocean? Why not around a pond?
Why not a sailboat?
Why are you doing this again?
After Scout dissapeared in the middle of the Atlantic Ocean in 2013 we had no immediate plans to give this another try, however the emotions that spawned the first project didn't go away, and in late 2016 the planning for Scout II began.What's different this time?
Phaw! A better question is 'what isn't different this time?' Technologies have become more available and easier to integrate, our money/time availability ratios have dramatically changed, and most importantly we've all had several more years of experience in our respective fields.
As far as electronics go, we're still using LiFePO4 batteries, but they're larger, have a state of charge measurement system, and are charged with larger and lighter solar panels that output more power. We now have current sensors on all major loads (including the bilge pump! :) and far fewer wires in the electronics box.
As far as the mechanical aspects go, Scout is still built with carbon and a Divinycell core but she is longer and has a redesigned motor-in-keel which removes one entanglement-prone appendage and offers improved handling characteristics.
In softwareland, Scout's software is now able to make decisions based on battery state of charge, time of day, and other information in order to make better use of the energy available to the system. We've added optimizations to the navigtation software, communications protocol, and tracking page.
Of course we've learned from Scout Im the importance of a backup tracking system. We plan on having two!
Will it send back pictures?
We aren't planning on sending back pictures of the ocean as Scout braves the Atlantic but we do plan on a GoPro in a box with a giant battery array, set with a timer to capture 10 seconds of video and 3 pictures every 3 hours.Who is funding this?
Scout I was funded by a Kickstarter campaign and donations through our website from amazing Scouters around the world. Scout II is self-funded by the Scout team and is supported by Waterman Marine.
Why the different colored dots on the tracking page?
 The tracking page now has more coloring to give some more detail as to Scout's sleep status!
If the icon is blue Scout is fully awake, green means Scout was sleeping between 0 and 50% of the time, yellow means up to 75%, orange is pretty much adrift, and a red/maroon indication tells you that Scout has fully shut down until more sun is available.
The tracking page now has more coloring to give some more detail as to Scout's sleep status!
If the icon is blue Scout is fully awake, green means Scout was sleeping between 0 and 50% of the time, yellow means up to 75%, orange is pretty much adrift, and a red/maroon indication tells you that Scout has fully shut down until more sun is available. There is a key available on the desktop tracking page, however mobile users will not have a key due to limited screen size. PINK dots indicate transmissions from Scout's backup tracker.
Why does the tracking page have a varying number of dots on it?
We have been monitoring website load times, and decided to modify the tracking data display to optimize for performance. http://www.gotransat.com/ tracking/ will display every tracking point Scout has sent us for the past 4 days. Prior to that it will display one out of every 10 points. You will likely see this on the map as Scout's path looking a bit choppier or disjoint for the first days of the trip. If you would like to view all of the data, please visit http://www.gotransat.com/ fulltracking/ - this has been done to lessen the load on our server, as well as increase your performance. Please let us know if anything is functioning incorrectly.
![]()
Are you going to fly over to get Scout?
Of course! We've set her course for a beautiful beach where we plan to recieve Scout and walk her 350 meters on our shoulders to Casa Paco (Google maps estimates the walk at 4 minutes but Scout is a bit awkward to carry so it'll probably take a little longer.) Hopefully Scout gets there during business hours (8am- midnight) but we'll figure something out if it turns into a late night landing. Another option is Bar Micaela which is about 15 meters away from where Scout is supposed to land (we can't find the business hours online so we might have to risk it.)
![]()
What are some of the features of the Scout tracker?
The Scout tracker is designed to be an easy-to-read map. However, there are also a few neat features that are a little less obvious.
Details of any data point can be brought up by clicking on a dot. Some useful things to know when looking at this display: Date/Time is EDT |
|
LAYERS The layers panel can be brought up by clicking the box in the upper right hand corner. New Waypoints: Show the waypoints Scout is following |
|
Distance measuring tool The distance measuring tool can be selected by clicking the little arrow near the zoom controls. You can then click an initial point, click another point on the map, and find the distance between the two. You can make as many line segements as you like; press the esc button on your keyboard to finish the measurement. |
|
Why does the tracker sometimes miss a dot?
Scout reboots itself twice a day (in the morning between 10:00AM and 11:00AM, and at night between 10pm and 11pm.) The reboot often causes Scout to not send one or two packets. (Scout usually transmits once every 20 minutes.)
![]()
Why did you guys send it directly to Spain? You should have put more waypoints in the ocean!
We agree! If you select "Scout Original Waypoints" from the layers menu, you'll see that we did plan on having Scout satisfy a number of waypoints throughout her journey in order to keep her on track. However, due to a bug in the waypoint handling code loaded onto Scout before the launch, Scout has unfortunately skipped many of the waypoints that it should be navigating to. Our best guess at this time is that she's navigating to waypoint 044, which is quite close to the Spanish coast. Because that waypoint is a few thousand miles away, Scout will drift north and south quite significantly over the coming weeks. The good news is that all other systems on Scout seem to be functioning properly, and this problem shouldn't repeat itself.
Scout's new path:
Scout's original path: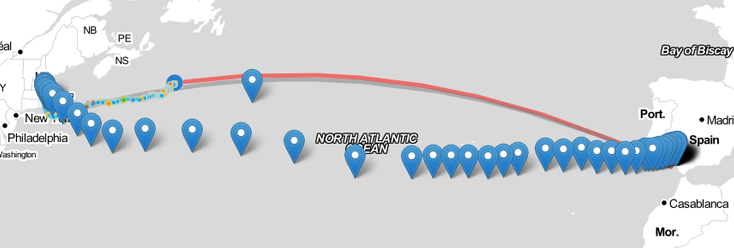
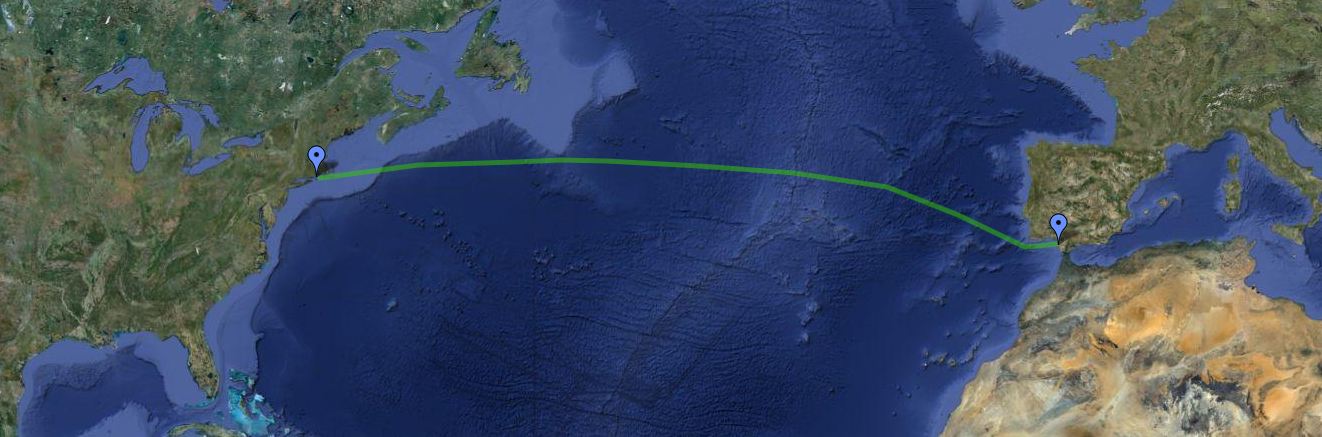
What are the red and gray lines?
The gray line projects the path that Scout should take to the next waypoint from the last waypoint that it satisfied; the red line is a straight line between Scout and the target waypoint. In optimal conditions, these lines would be on top of each other.
![]()
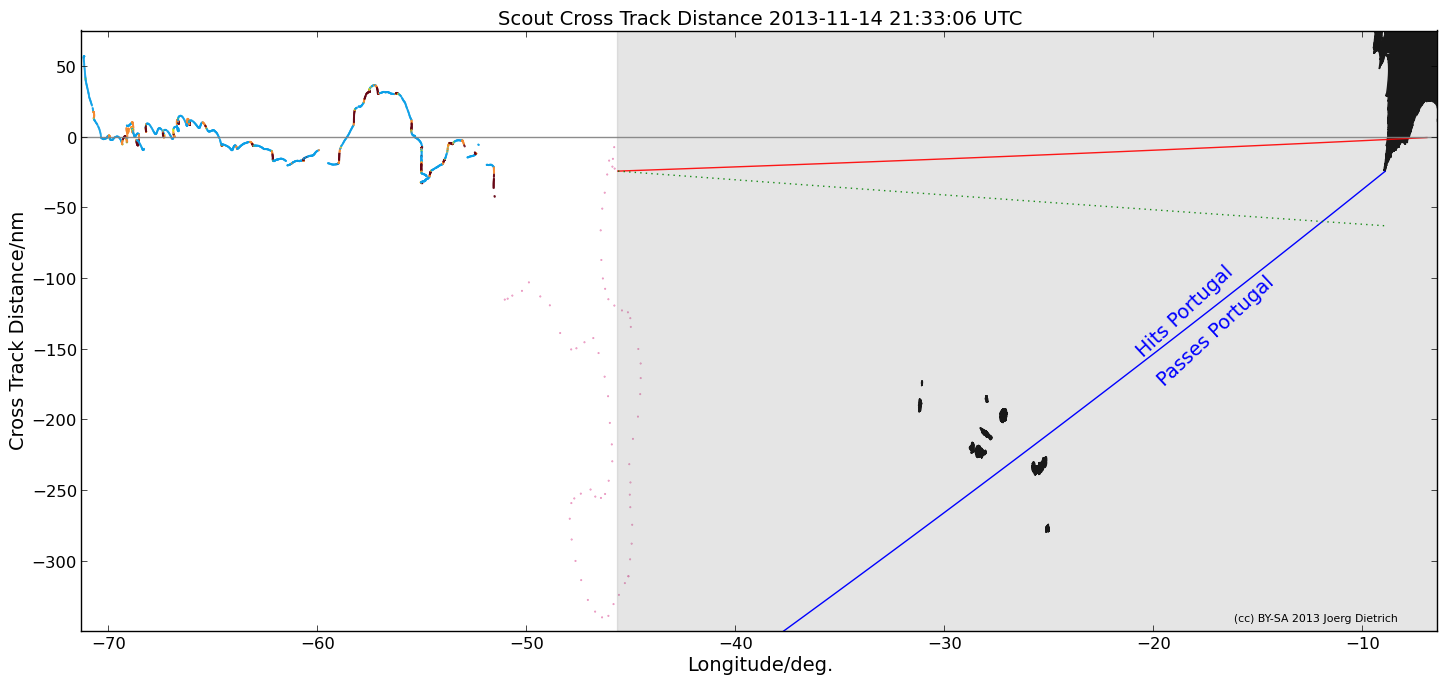
Will Scout crash into Portugal?
It's hard to say! Check out the analysis done by Joerg Dietrich on his webpage. The image below updates every hour and can be used to help estimate whether or not Scout will crash into Portugal.
What about mobile devices?
The Scout tracker works best on iPhone 5, but is supported by most mobile browsers.
Swipe the top of the screen to switch between:
Pane 1:
Compass, Waypoint, COG, and speed
Pane 2:
Time elapsed since launch
Pane 3:
Distance from RI, distance overall, distance to Spain
The rest of the page works the same; pinch to zoom is supported on iPhone (other OSes are untested)
If you press the "+" button and press "Add to home screen" you can put the Scout Tracker on your home screen as an icon!
Older FAQs:
Where's it going?
The planned destination is Sanlucar de Barrameda, Spain. This is where Columbus left from on his second journey to the New World.
What happens when it flips over?
![]() Scout is designed to roll back to its operational position when overturned. Its has a keel with weight on the bottom that ensures the stability of the vessel. If it flips over, it'll just right itself and keep going.
Scout is designed to roll back to its operational position when overturned. Its has a keel with weight on the bottom that ensures the stability of the vessel. If it flips over, it'll just right itself and keep going.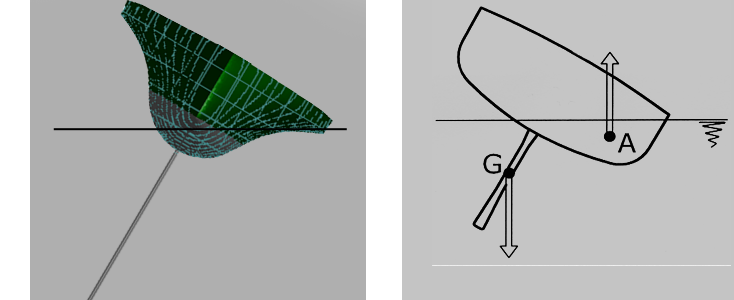
Some Statistics
Scout is 13.5 feet long,
25 inches wide,
weighs a bit under 160 pounds.
will travel at a cruising speed at between 2 and 4 knots.
will relay telemetry information via Iridium 9612 every hour
will be trackable at GoTransat.com/tracking
Is this project affiliated with a company or university?
No.
Is this the first time this has been done?
If the boat successfully makes the crossing, yes. The previous record for the length of time spent on the water by an autonomous surface vessel trying a transatlantic trip was set by the Pinta in 2010. The Pinta is suspected to have capsized or have been hit and sunk by another boat after numerous system failures. The Pinta sailed for over four hundred hours but made it only 61 miles off the coast of Ireland.

Photo by colinsauze
Also, one needs to understand that there are a few different classes of boat that are trying to make this journey (or go even farther). Scout is essentially an electric motorboat. The Pinta (and all of the other Microtransat boats) are sailboats. The differences are significant, and each type of vessel has a unique set of challenges associated with it.
Will it be a world record?
As far as we can tell, yes.
How will it be constructed?

Scout's hull is constructed with a form of strip planking which produces a very light and strong structure. See our construction page for details about the build.
What about avoiding collisions with other boats?
From the Microtransat.org website:
Q: Do the boats have to include any kind of autonomous collision-avoidance system to prevent collision with other floating objects?
A: No you don't have to. The International Rules for Prevention of Collisions at Sea (COLGREGs) define a vessel as carrying passengers or cargo, it is our understanding that this doesn't class an autonomous boat as a vessel and therefore exempts it from these rules. There is no current legal status for autonomous boats, from what we can tell in speaking to the IMO and both the UK and French coastguards it would be classed as a buoy not a vessel. By keeping the boats length at 4 metres most vessels wouldn't even realise a collision had taken place. Additionally we recommend each competitor carry a radar reflector, make their boat highly visible and have clear warnings that it is unmanned. Competitors are free to implement collision avoidance if they wish (but are not required to by the rules) and to make use of technologies such as RADAR or AIS (Automatic Identification System).
The above outlines our thinking for this project as well; no collision avoidance system would be feasible for us to use, and the tiny chances of encountering another vessel make this something that we don't worry about.
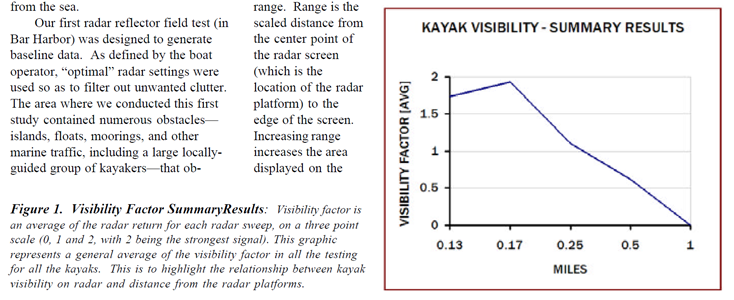
We found an interesting study by the University of Maine that examined the effectiveness of radar reflectors on sea kayaks. We don't believe that there's an effective way for us to mount a RADAR reflector on Scout, and even if we could, it doesn't seem that it would be very effective.
Why this project?
We have always been into building things- more on this in the crew page. So far, the projects that we've worked on have been made by many other people. This will be the first project that we do that hasn't been done by others before us. We love working on boats, and I don't think that any of us could be happier with the nature of this project.
How much will the project cost?
The cost of the project totaled out to around six or seven thousand dollars.
What part of this project worries you the most?
The mechanical components have been a topic of significant conversation as they will need to withstand rough conditions, corrosion, and operate reliably.
How many launches did it take to get her out there?
We launched Scout three times- the first was with a big launch party but failed due to a week of poor weather while Scout was still close to land. After retrieving her from the first attempt she was launched again in a midnight bid, but had to be retrieved because of a rudder servo failure. The third launch took place at the end of August, 2013, and was a 1am launch at Sakonnet Point with a bunch of spectators and project supporters in attendance.
How long will the batteries last?
It's hard to say! Variations in cloud cover, Scout's heading, the cleanliness of the panels, etc. will impact the power Scout has available during the nights.
Why across the ocean? Why not around a pond?
We didn't want to spend a bunch of money on a project that would do something that only engineers would think is cool (the average person would not see a five foot long boat going around in circles in a pond very cool). The transatlantic mission gets everyone excited; many people get stoked about the project once they hear about it, and they really want to see it succeed.
Why not a sailboat?
It might seem that we should be using a sailboat to do the crossing. After all, you wouldn't have to power much- the sail gives it enough energy to move forward, and you'd only need solar panels for the onboard electronics. However, we've looked at the landscape of robotic boats so far and realized that we probably wouldn't be able to do it, or that we'd have a better shot doing it this way.
As anyone who owns a sailboat knows, when you fix something on a sailboat, something else will break. We've been breaking and fixing things on boats for years; It's difficult to "keep it simple" when the boat would be exposed to such a variety of conditions. There are a few main concerns to building such an animal:
-It is physically more complex; more forces on it (from the wind), easier to capsize, difficult to stow the sail in adverse conditions, wind is shifty near the surface of the water in such large waves
-More complex programming- upwind sailing, tacking, etc.
So what now?
We've decided to keep this project simple. What we're doing is building a hull. There will be a motor in the hull that turns a propeller. The propeller will make the boat go forward. The batteries will get charged by the sun. If it's cloudy, the electronics compensate. The electronics will tell it where to go and will be simple and not a pain to program. And hopefully, it will work.